According to Bolonkin (2008), pipelines are, in general, the most economical way to transport large amounts of oil or natural gas over land. Compared to railways, this modal has a lower cost per unit and greater capacity. In addition, it works 24/7, except during maintenance. Interruptions that may affect the transportation period, such as weather or traffic, do not affect pipeline operation.
However, a significant disadvantage of using this type of transport is the possibility of leaks that may occur as a result of erosion, corrosion, landslides, acts of vandalism, actions of third parties, among others. Due to the high pressure at which the products are pumped and, depending on the type of substance transported, these leaks can cause serious environmental and socioeconomic damage.
With this in mind, oil and gas transportation companies are continually looking for more sensitive, accurate, repeatable, reliable and robust leak detection systems (SDVs). The American standard API 1149 defines these characteristics as follows:
There are several technologies for leak detection that have different advantages, disadvantages and levels of complexity. The API 1130 standard classifies these technologies into two types:
One system that currently protects more than 11,000 miles of pipeline around the world is the Synergi Pipeline Simulator (SPS), which combines Statefinder and Leakfinder modules. These modules are based on the represented states (variable conditions) of a pipeline system.
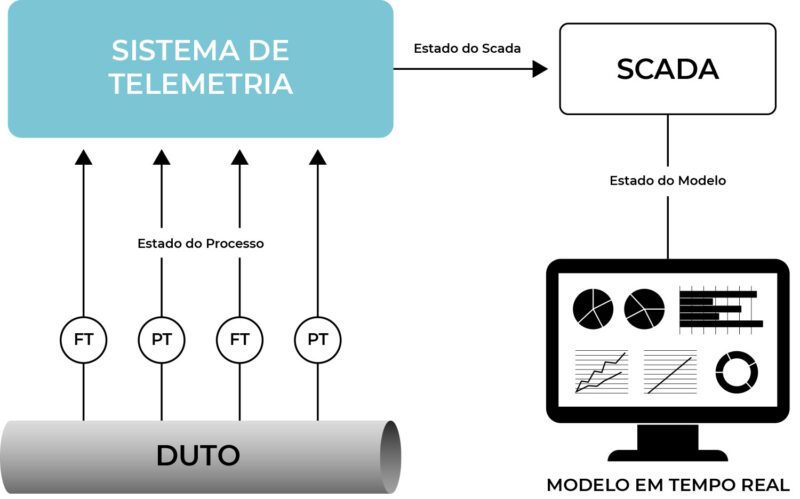
For the system to perform as expected, it is necessary to create a hydraulic model of the pipeline, provide real-time measurement data from SCADA, and also provide consistent fluid property data. Thus, through the field data and the fundamental laws of fluid mechanics, the model will track conditions very close to the real pipeline and investigate temporal anomalies between the measured data and the model.
One mechanism that the SPS uses to reconcile differences between measured and modeled head losses are diagnostic flows, which are flows injected or removed from the model to preserve the mass balance when there is a discrepancy. If average diagnostic flows exceed a predefined dynamic threshold, the software will:
There are 5 alarm statuses: (1) Starting (in case detection has been turned off), (2) Okay (there is no abnormality), (3) Circulation (indicates circulation has occurred), (4) Injection (indicates flow injection) and (5) Leak (indicates leakage). Statuses 3 and 4 normally indicate modeling or instrumentation problems, as they are very unusual events to occur in an operating pipeline.
It is important to note that, as stated in Annex A of API 1130, no CPM (Computational Pipeline Monitoring) methodology or technology is applicable to all pipelines, because each system has an exclusive configuration and operation. Furthermore, detection limits are difficult to quantify due to the unique characteristics presented by each pipeline. Boundaries must be determined and validated, system by system, and perhaps section by section. Pipeline operating conditions (steady state or transient) will influence the minimum size of product loss that can be detected so detection limits for CPMs are not fixed. During transients the detection limits are higher.
Another factor that must be highlighted is that efficiency objectives (sensitivity, accuracy, repeatability, reliability, availability and robustness) are often at odds with each other. For example, high sensitivity in leak detection generally leads to more false alarms and, consequently, lower reliability, so it is essential that tuning is carried out and monitored according to the main relevant points defined by the customer.